U乐国际数智科技(深圳)有限公司
TSUN ELECTRONIC TECHNOLOGY(SHENZHEN) CO.,LTD


WeChat/咨询


角度传感器是指能感受被测角度并转换成可用输出信号的传感器。角度传感器,顾名思义,是用来检测角度的。它的身体中有一个孔,可以配合乐高的轴。当连结到RCX上时,轴每转过1/16圈,角度传感器就会计数一次。
往一个方向转动时,计数增加,转动方向改变时,计数减少。计数与角度传感器的初始位置有关。当初始化角度传感器时,它的计数值被设置为0,如果需要,你可以用编程把它重新复位。
通过计算旋转的角度可以很容易的测出位置和速度。当在机器人身上连接上轮子(或通过齿轮传动来移动机器人)时,可以依据旋转的角度和轮子圆周数来推断机器人移动的距离。然后就可以把距离转换成速度,你也可以用它除以所用时间。
实际上,计算距离的基本方程式为:距离=速度×时间
由此可以得到:速度=距离/时间
磁敏角度传感器
磁敏感角度传感器采用高性能集成磁敏感元件,利用磁信号感应非接触的特点,配合微处理器进行智能化信号处理制成的新一代角度传感器。
优点:
1、磁钢位置未对准自动补偿;
2、故障检测功能;
3、非接触位置检测功能,是满足苛刻环境应用需求的理想选择。
应用领域:
1、工业机械、工程机械建筑设备、石化设备、医疗设备、航空航天仪器仪表、国防工业等旋转速度和角度的测量。
2、汽车电子脚踩油门角位移,方向盘位置,座椅位置,前大灯位置。
3、自动化机器人,运动控制,旋转电机转动和控制。
电容式角位移传感器
电容式角位移传感器用于测量固定部件(定子)与转动部件(转子)之间的旋转角度,因其具有结构简单,测量精度高,灵敏度高,适合动态测量等特点,而被广泛应用于工业自动控制。
一般来说,电容式角位移传感器由一组或若干组扇形固定极板和转动极板组成,为保证传感器的精度和灵敏度,同时避免因环境温度等因素的改变导致介电常数、极板形状等的间接变化,进而对传感器性能产生不利影响,对传感器的制作材料、加工工艺以及安装精度提出了较高要求,为了克服电容角位移传感器的局限性,国内外科学工作者进行了长期的大量研究工作,其主要思想方法是将传感器设计成差动结构。
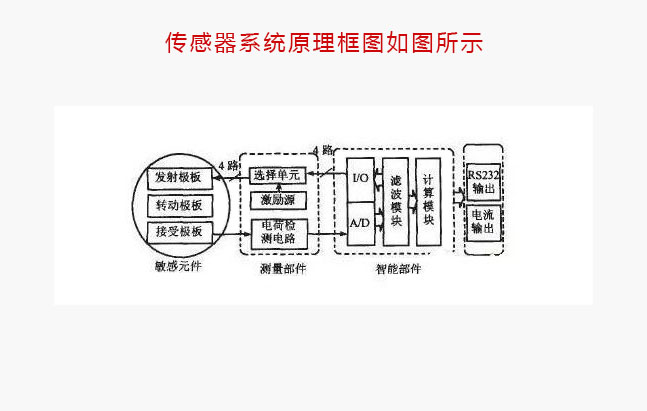
由敏感元件、测量电路、智能部件与接口部件构成,敏感元件的结构所示如图1,测量部件由选择单元、激励源和电荷检测单元组成;智能部件由I/O单元、A/D单元、滤波单元、角度计算单元等组成;接口部件由电流输出单元、RS232通讯单元等组成。
敏感元件检测反映角度位置的电容值,是传感器的初始转换单元,测量单元采用了先进的抗杂散微小电容检测电路,将电容值转换为电信号,智能部件的主要功能是通过比例式算法计算出角位移量,最后由接口部件输出角度计算结果。
倾角传感器
倾角传感器经常用于系统的水平测量,从工作原理上可分为“固体摆”式、“液体摆”式、“气体摆”三种倾角传感器,倾角传感器还可以用来测量相对于水平面的倾角变化量。
倾角传感器基本原理
理论基础就是牛顿第二定律,根据基本的物理原理,在一个系统内部,速度是无法测量的,但却可以测量其加速度。
如果初速度已知,就可以通过积分计算出线速度,进而可以计算出直线位移。所以它其实是运用惯性原理的一种加速度传感器。
当倾角传感器静止时也就是侧面和垂直方向没有加速度作用,那么作用在它上面的只有重力加速度。重力垂直轴与加速度传感器灵敏轴之间的夹角就是倾斜角了。

粤公网安备 44030502003974号

